① 研究の背景
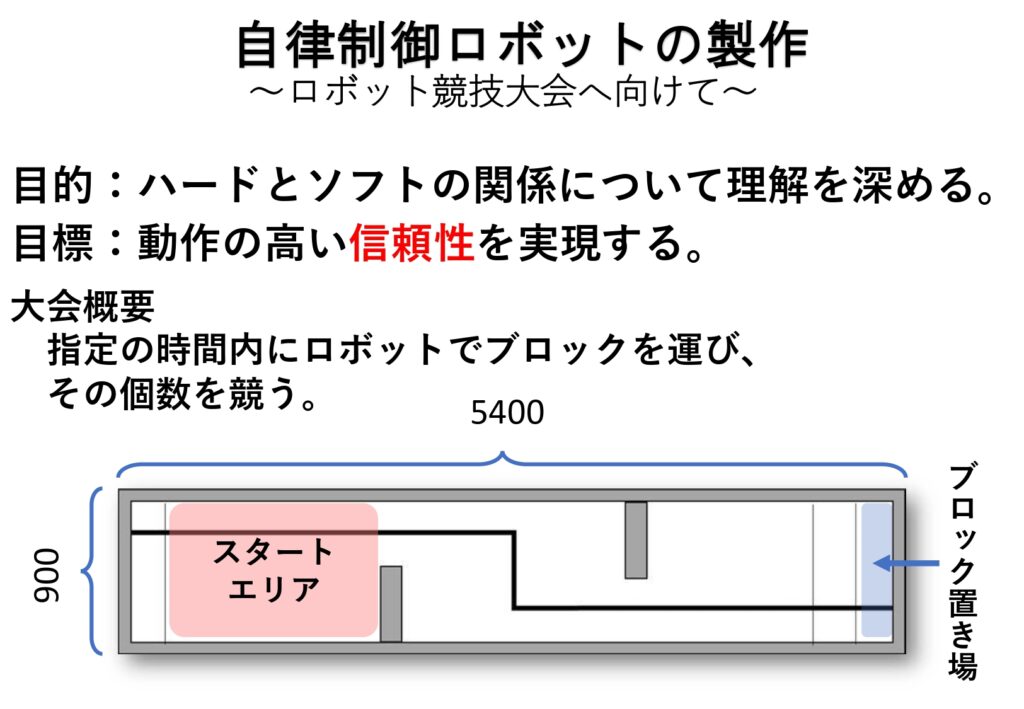
これまで学んできたハードウェアとソフトウェアの知識を活用し、PLCロボット造ることでハードウェアとソフトウェアの関係性について理解を深める。
また機体作成や基盤作り、配線などの作業を通して正しい器具の使い方を身につける。これらを研究の目的とし、高い信頼性を実現することを目標とする。
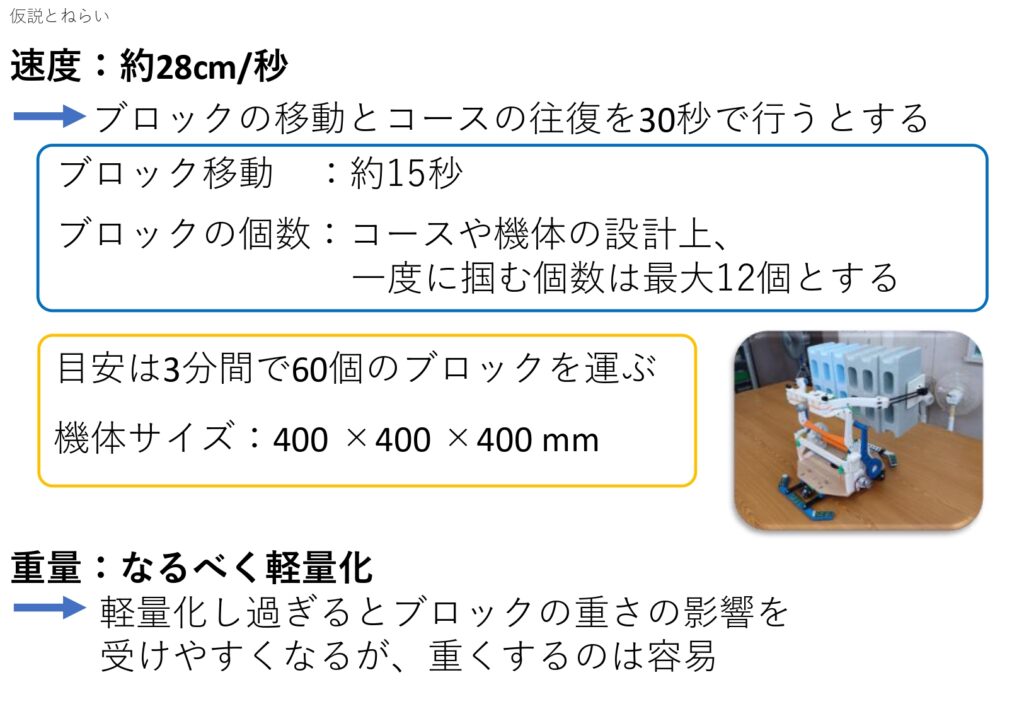
➁ 仮説とねらい
自立制御を実現することはハードウェアで学ぶマイコンのプログラミングで可能である。機体のアームやフィンガーにセンサーを取り付け、どのような動きをしたかデータを取得することで自律的な動作を可能にできる。また、ライントレースにより人が操作せずとも障害物を避けて進むことができる。
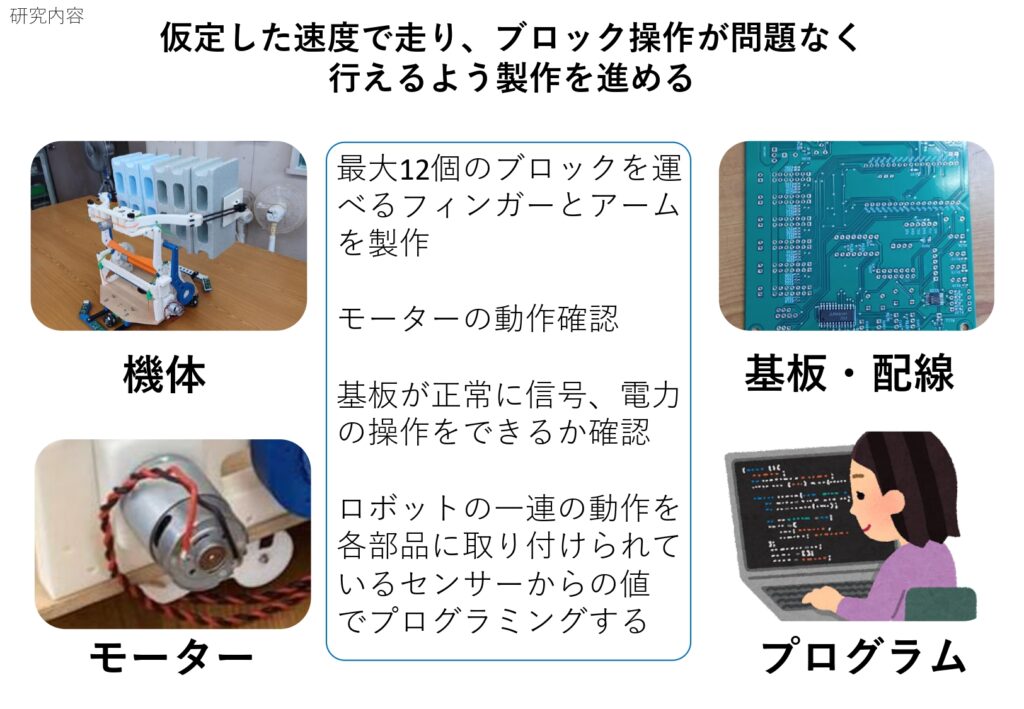
③ 研究内容
初めにどのようなロボットにするか検討し、要求仕様書を作成する。なるべく明確に詳細に作成する必要がある。仕様書が出来たら機体作成に移る。CADを用いて設計を行い、3Dプリンタでプリントアウトし組み立てていく。機体がおおよそ完成したら基盤の作成に移る。ここまでがハードウェアの内容になる。次にロボットとして動かすためのプログラミングを行う。VScode、C言語を使用しプログラミングしていく。ロボットの動きを数値で取得、制御する。これらの過程を通し、研究の目的であるハードウェア、ソフトウェアの関係について理解を深め、器具の使い方も身につけてゆく。
④ 技術的知識

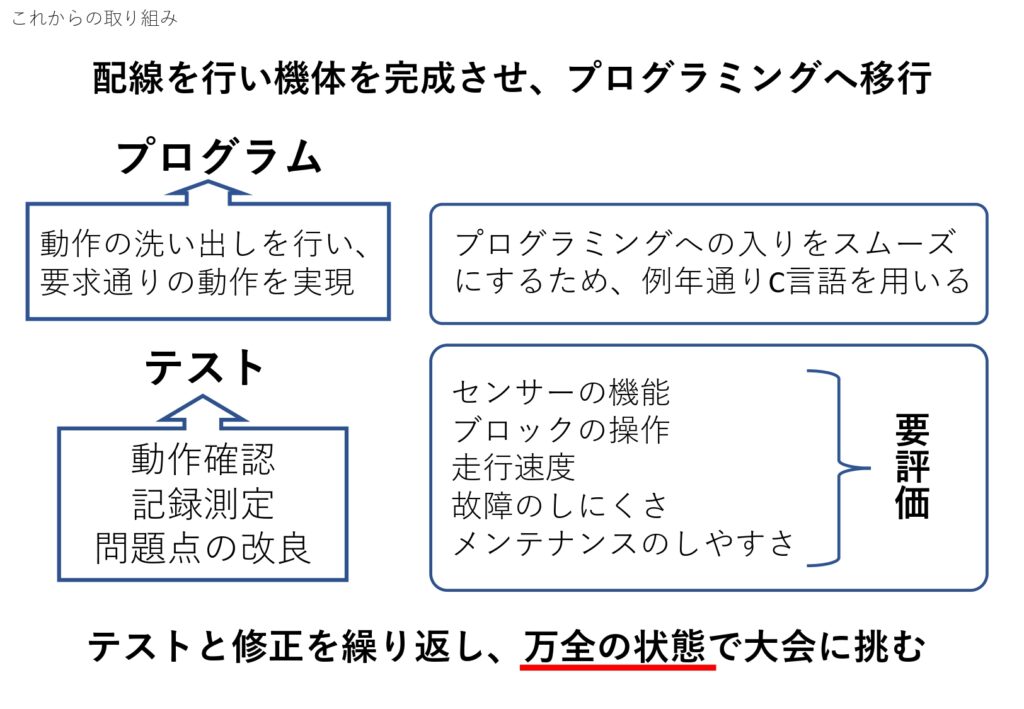
⑤ これからの取り組み
➅ まとめ
大会での上位入賞が果たせるかはわからないが、研究から得られる複数の人とコミュニケーションをとりながら一つのものを作り上げる経験はこれからものづくりに関わる自分にとってとても大切なものである。実現したいものを考え、それに必要な技術について知り、実際にやってみるという過程、そこからこれまで学んできたことがどうものづくりに活かせるのかを知ることができるという点がこの研究のもたらす大きな結果、成果であると考える。